ザイゴマインプラントに関連した論文
本日紹介する論文は、

~はじめに~
今回ご紹介するのは2024年10月に BMC Oral Healthにて報告されたこちらの論文です。コンピュータガイド手術テンプレートを用いたザイゴマインプラント埋入の精度を評価した研究論文です。歯槽頂部の骨切削および補綴的に望ましい位置への埋入シミュレーションを行う際に多いに役立つと思われますので、これからザイゴマインプラントを用いた治療をされる先生方には是非読んで頂きたい論文です。
~緒言~
1988年にBrånemarkが初めてザイゴマインプラントを導入して以来、そのデザイン、外科的アプローチ、荷重プロトコルに関して多くの改良が報告されてきた。文献上では高い生存率および成功率が示されており、ザイゴマインプラントの適応症は、従来型インプラントの埋入に十分な骨量が得られない高度に吸収した上顎堤へと拡大している。頬骨における強固な固定力が、萎縮した上顎骨の低い骨質を補う形となるためである。多くの場合、骨吸収後の上顎残存形態からみて骨移植は適応外となる。ザイゴマインプラントは、安定した皮質骨への固定により即時荷重が可能であり、骨移植の必要を回避できることから、治療期間の短縮という利点もあり、無歯顎上顎のリハビリテーションにおける有力な選択肢となっている[1,2,3]。
しかし、ザイゴマインプラント手術は、術野の可視性が限られることや頬骨の複雑な解剖構造により、手技的に困難を伴う。上顎洞外側壁の湾曲や、頬骨後壁の波状形態は、長尺ドリルの経路やインプラント体の正確な位置決めを難しくするため、特にフリーハンドによる骨切削では熟練度の低い術者にとって大きな挑戦となる。その結果、眼窩や翼突下窩への穿孔などの重篤な合併症を引き起こす危険性がある[2,4,5]。
2000年、SchrammらおよびWatzingerらにより、これらの複雑さを軽減するためにコンピュータ支援ナビゲーションシステムがザイゴマインプラント治療に初めて導入された[6,7]。その後、Vrielinckらは2003年に、個別設計の静的コンピュータガイドドリルテンプレートを用いたザイゴマインプラント埋入精度に関する初のin vivo研究を報告した[8]。従来のフリーハンド法と比較して、こうしたガイドシステムは計画したインプラント位置を手術部位へより正確に反映できることが示されている[4,5,9,10]。
しかし、従来型インプラント用テンプレートはこの目的には十分ではないと考えられている。すなわち、単一のクレスタルスリーブのみを備えるこの方式では、長尺ドリルの先端部(アペックス側)の安定性と方向性を十分に制御できない。また、長尺ドリルは機械的ストレスが大きく、テンプレート自体の安定性を損なう恐れも指摘されている[2,11]。
このような課題に対応するため、コンピュータ支援ザイゴマインプラント手術の精度を高めるさまざまな概念・技術が提案されてきた。2016年にはChowが、長尺ドリルを安定化させるために設計された二重スリーブ式ドリルガイドという新しい手法を提唱した[11]。その後、多くの研究者がこの概念を基に改良を加え、偏差をできる限り最小化することを試みている[2,12]。
それでもなお、これらの研究のいずれもが「最も高い精度を示すゴールドスタンダード」と認められるほどの強いエビデンスを提供したわけではない[5]。
本研究の目的は、既報のデバイスおよびサージカルガイドデザインを組み合わせた改良プロトコルを用い、その有効性を評価することにあります。我々は、Chowが提案した二重スリーブドリルガイドを採用し、Rinaldiらが提唱したラテラルウィンドウ付きのコンピュータガイドサージカルテンプレートを組み合わせて使用した[11,13]。
材料および方法
本前向き試験(prospective trial)は、上顎歯列のリハビリテーションをインプラント治療によって希望する患者を対象に実施した。
サンプルサイズの算出は、Vrielinck らの既報研究データを基に、G*Power 3.1.9.4ソフトウェアを用いて行った。この先行研究では、CTベースのプランニングにより埋入されたザイゴマインプラントの平均角度偏差5.14°、標準偏差2.59が報告されていた。これに基づき効果量(effect size)は0.82と算出された。
本研究では、仮想プランニングおよびサージカルガイドを用いて埋入されたザイゴマインプラントの平均角度偏差の95%信頼区間が真の平均値の±3°以内に収まるようにするために、13本のインプラントが必要であると計算された。t検定の検出力(power)は80%、有意水準(両側)は5%とした。
本研究を実施する前に、プロトコルはアイン・シャムス大学歯学部倫理審査委員会によって審査され、2020年7月15日開催の第105回委員会において承認を受けた(申請番号:FDASU-RecD072029)。
被験者の募集は、アイン・シャムス大学歯学部口腔・顎顔面外科学講座およびエジプシャン・ザイゴマ・インプラント・インスティテュート(EZII)クリニックにて行われた。
すべての参加者について全身的健康状態を記録し、以下の選択基準を満たした者が研究対象とされた。
適格基準(Inclusion criteria)
18歳以上で、インフォームドコンセントを理解し署名できる患者。
上顎歯列のインプラント治療によるリハビリテーションを必要とする患者。
Bedrossianのzone IIおよびIIIの両方、または3つすべてのゾーンにおいて高度な歯槽骨吸収を有する患者[14]。
骨移植の不成功歴、従来型インプラントの失敗歴、または追加の骨造成処置を拒否した患者。
最低幅15 mmのザイゴマ骨を有する患者[15,16]。
良好な協力度および口腔衛生習慣を有する患者。
除外基準(Exclusion criteria)
心血管疾患、呼吸器疾患、または全身麻酔に適さない全身的疾患(ASA分類III, IV, V, VI)を有する患者。
インプラント埋入が禁忌となる状態(例:頭頸部への放射線照射歴、静注ビスフォスフォネート使用歴、コントロール不良の糖尿病)を有する患者。
急性上顎洞感染または未治療の上顎洞嚢胞を有する患者。
重度喫煙者(1日20本以上の喫煙者)。
開口制限(切歯間距離3 cm未満)を有する患者。
術前プランニングおよびサージカルガイド設計
最適な仮想治療計画を正確に立案するため、マルチスライスCT(MSCT)スキャンから得られたDICOMファイルを Blue Sky Plan ソフトウェアにインポートした。
撮影条件は以下の通りであった:
(i) 軸位断画像のみ、
(ii) ガントリーチルトなし、
(iii) スライス厚 0.625 mm、
(iv) スライス間隔 0.625 mm、
(v) 視野範囲:上方はグラベラ(眉間部)から下方は下顎弓まで、
(vi) 骨ウィンドウ設定。
このソフトウェアを用いてCT画像を操作し、インプラント埋入位置の仮想プランニング、サージカルガイドの設計、および3D仮想ボリュームのSTL形式での出力を行った。
インプラントの理想的な位置は、機能的・補綴的に最も良好な位置関係を達成するようにソフトウェア上で決定された。
サージカルガイドおよびドリルガイドの設計
ガイド設計過程において、ザイゴマインプラントの経路に沿ってインプラント径よりやや広い「開窓部(cut-off window)」を設けた。
さらに、コンピュータガイド式サージカルテンプレートと併用して、本研究では「ザイゴマドリルガイド(zygoma drill guide)」と呼ばれるカスタム二重スリーブ式ドリルガイドキットを使用した。
このザイゴマドリルガイドは、Chowが開発した原設計を基に若干の改良を加え、CADソフトウェアで設計し、ステンレススチール製で製作された。
洗浄およびオートクレーブ滅菌のための分解構造も考慮されている。
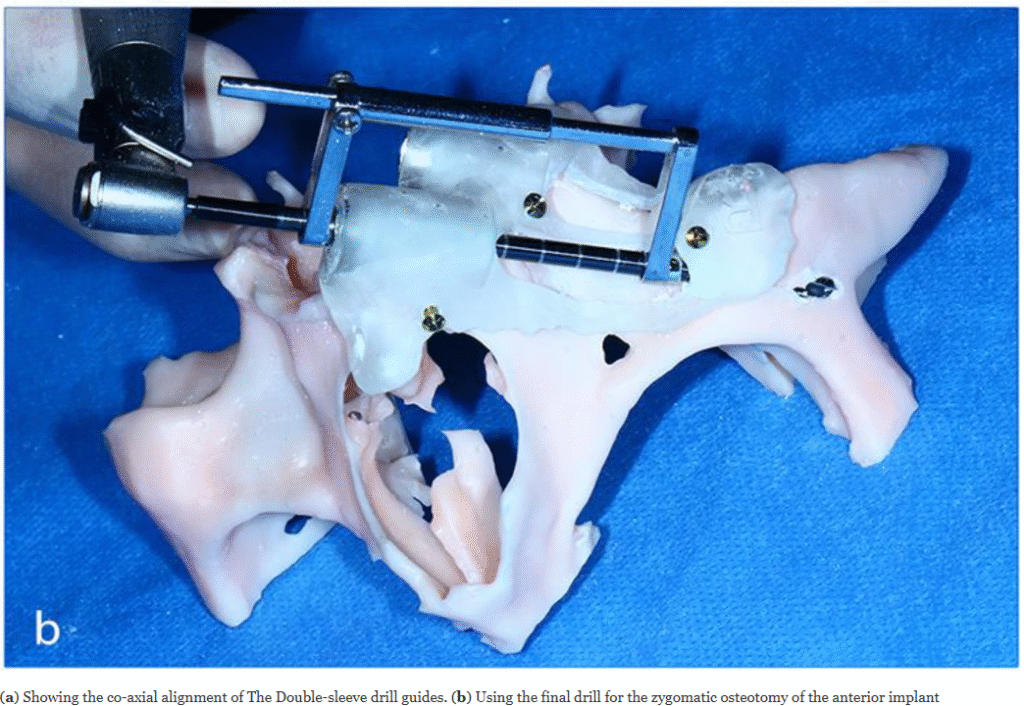
本キットは、メーカー純正ドリルセット内の異なる径のドリルそれぞれに対応した3種類のガイドで構成されていた(図1a)。
各ドリルガイドは2つの同軸ヘッドから成り、ドリルの両端(エントリーポイント)を誘導する。
それぞれのヘッドには、対応するドリル径より内径が0.15 mm大きい金属リングが設けられている。
両ヘッドは開放型チューブ内をスライドする矩形ロッドによって連結されている。
上顎側のエントリーヘッドは、サージカルテンプレートに取り付けられた金属スリーブに挿入される。
一方、出口側ヘッドは、テンプレートのラテラル開窓部に装着され、スリーブ状または半スリーブ状の延長部に支えられて位置決めされた。
テンプレートに装着された状態では、ドリルは最初のエントリーヘッド(ドリルスリーブ)を通過し、第二のザイゴマ側ヘッドに入ってからザイゴマ骨を穿孔する構造となっている。
サージカルガイドおよび3Dモデルの作製
顔面中部の3DモデルおよびサージカルガイドはSTL形式で出力し、Anycubic Photon Mono X(MSLA方式)3Dプリンターを用いて透明フォトポリマーレジンで造形した。
手術前にはすべての症例で3Dモデル上にてリハーサル手術を実施し、実際の手術と同一の手順とプロトコルを厳密に再現した(図1b)。
ガイドの滅菌
手術前に、サージカルテンプレートは2.4%活性グルタルアルデヒド溶液に20〜30分間浸漬して高水準消毒を行い、その後滅菌生理食塩水で洗浄した。

手術は全身麻酔下で鼻腔挿管(nasotracheal intubation)を行い実施された。すべての解剖学的ランドマークを十分に露出した後、サージカルテンプレートを所定の位置に設置した。テンプレートが正しく装着されたことを確認した後、長さ10〜14 mmの2.0スクリューを4〜5本用いて固定した。
使用したザイゴマインプラントは JDZygomaインプラント(JDentalCare, Madona, Italy) であり、以下の仕様がある:
メインインプラント径:Ø4.3 mm
最大インプラント径:Ø4.5 mm
埋入可能長:18 mm
チップ径:2.15 mm
インプラント長:30〜60 mm(2.5 mm刻み)
骨切削(オステオトミー)は2段階アプローチで行われた。
まず、メーカー純正のキーなしガイド付きドリルキットを用いて、歯槽骨部分の骨切削を完了した。順次ドリルを口蓋側から歯槽頂を穿通させ、頬側まで到達させた。歯槽骨オステオトミーの完了は、ザイゴマインプラント用ドリルキットの最終ドリル径に相当するドリルを用いて行った。このドリルも同社製である。
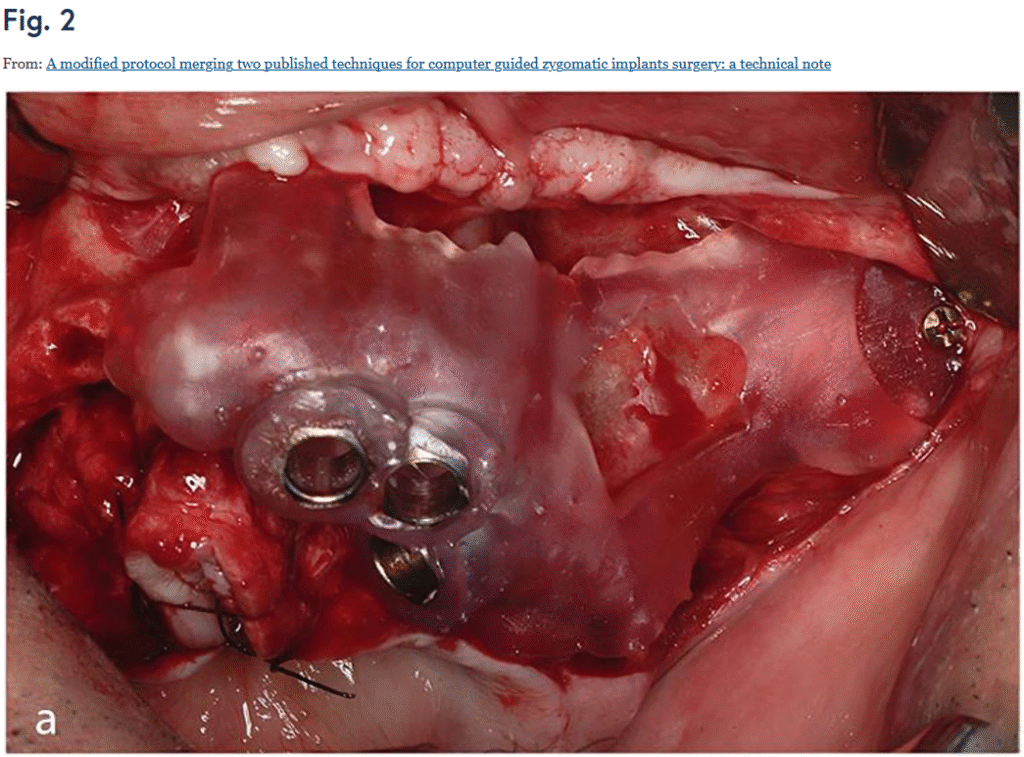
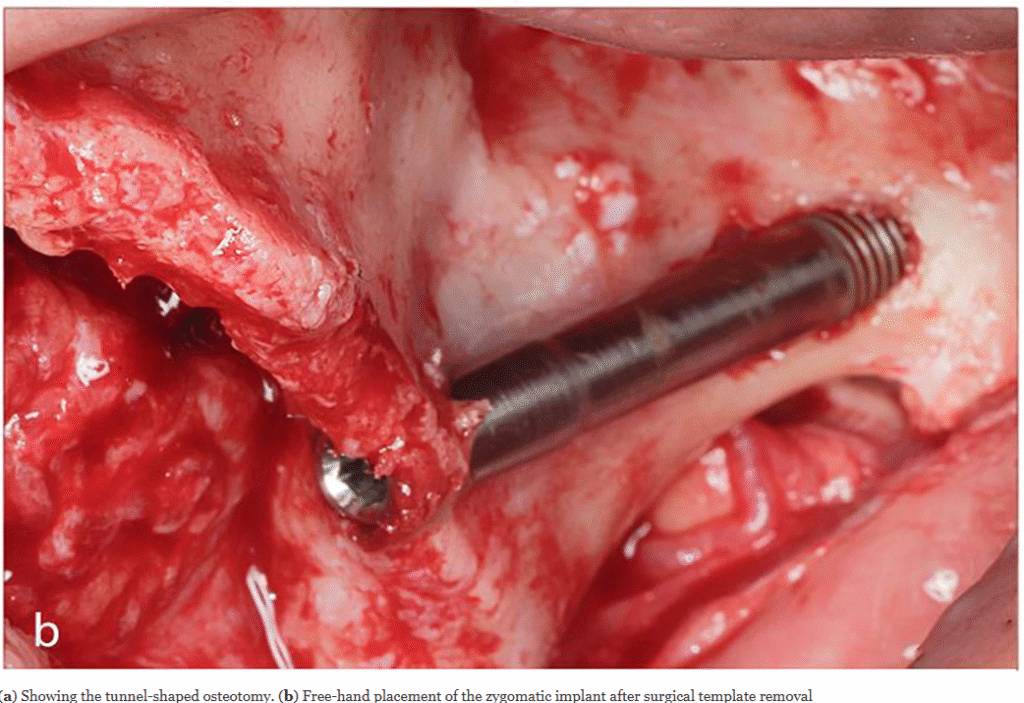
次に、オステオトミーの第2段階として、3本のザイゴマドリルガイドを使用した。各ガイドの第一エントリーヘッドをサージカルテンプレートの金属スリーブに装着した後、長尺ドリルの先端を頬骨の第二エントリーポイントに正確に誘導した。ドリルは、テンプレートに設けられた開窓部から確認しつつ、頬骨に到達するまで進め、インプラント埋入用の埋入窩を作製した(Fig 2)。
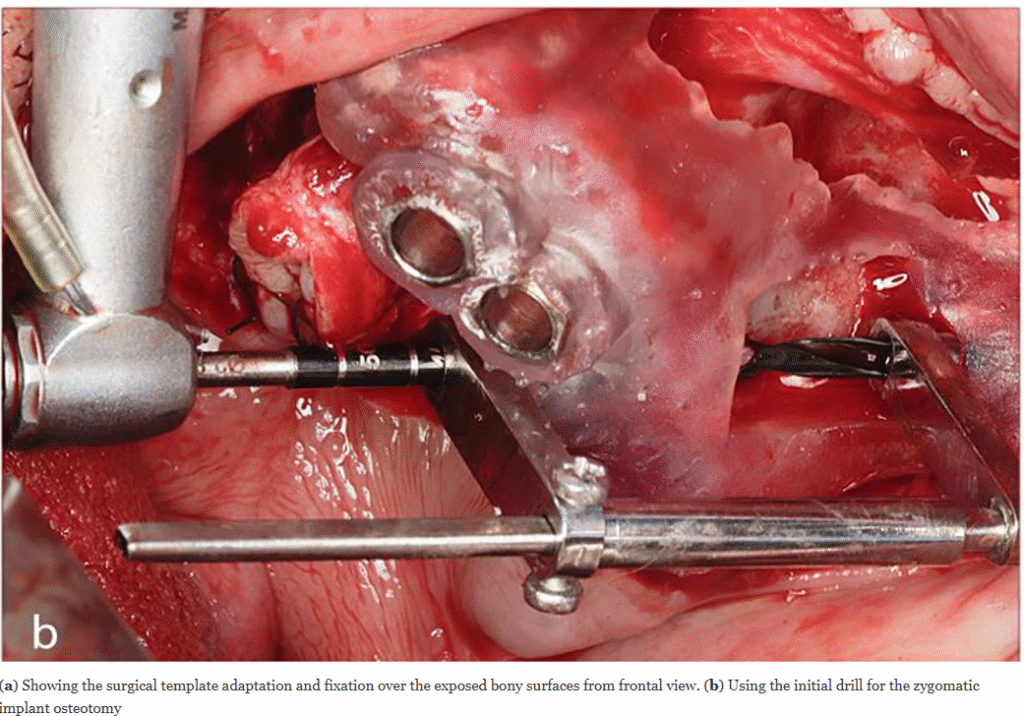
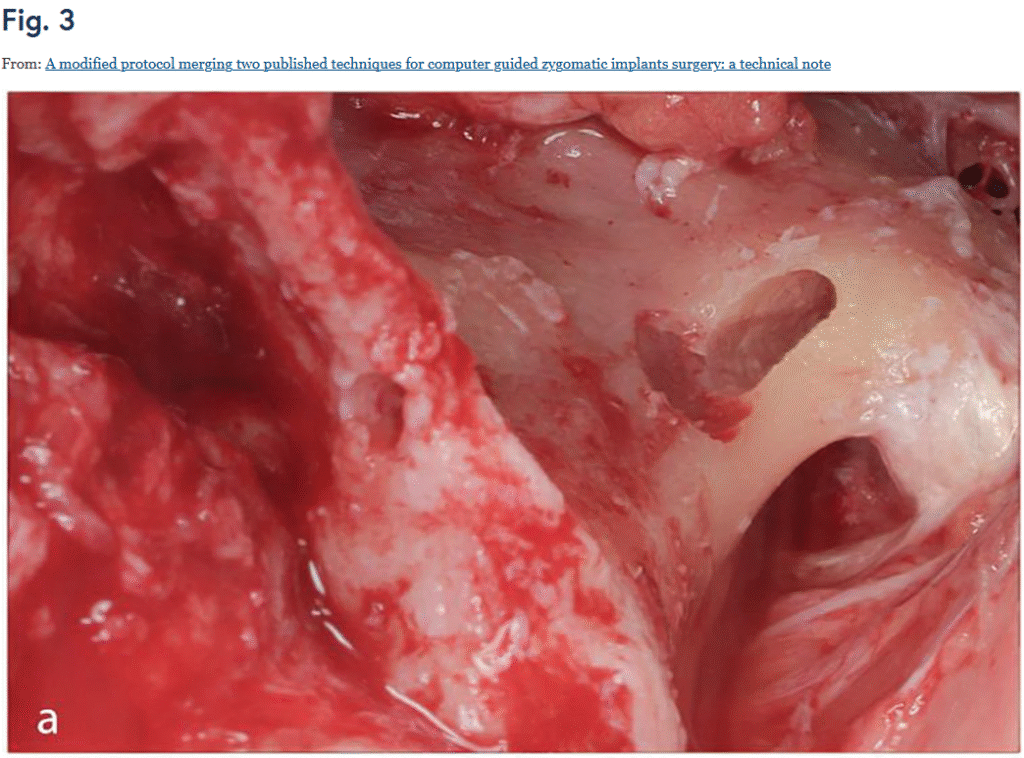
オステオトミーを完了し、サージカルガイドを取り外した後、デプスゲージ(depth gauge)を用いて、骨切削の深さおよび方向を確認し、ザイゴマインプラントの適切な長さを確認した。その後、各ザイゴマインプラントを手動で埋入し、インプラント埋入トルクが 80 N/cm を超えないように注意しながら、先端が頬骨の出口下縁に到達するまで埋入した(Fig 3)。
最終的に、頬脂肪体(buccal fat pads)を用いてインプラントの露出した骨軸部を被覆し、周囲の軟組織の質を向上させた。その後、粘膜弁を再配置し、4-0ポリグリコール酸縫合糸で縫合を行った。
術後4〜5日以内に再診を行い、創傷治癒の経過を確認するとともに、感染の有無を確認した。さらに、術後10日目に創部の完全治癒を確認したうえで抜糸を行った。
術後のインプラント位置を評価するため、術後2週間で顔面骨のMSCT(マルチスライスCT)撮影を全症例に依頼した。術後CT撮影は術前と同一の撮影条件および同一の放射線センターで実施することを必須とした。
画像解析と計測
画像の重ね合わせ(superimposition)後、CAD上でのインプラントおよび実際の術後インプラントの両方において、同一位置の固定基準点(ランドマーク)を設定した。
これらの基準点は、インプラントのプラットフォーム部(エントリーポイント)およびアペックス部(エグジットポイント)の両端に定義された。
次に、頭蓋に対して以下の3つの基準平面を設定した:
正中矢状面(Mid-Sagittal Plane; MSP)
フランクフルト平面(Frankfort Horizontal Plane; FHP)
冠状面(Coronal Plane; CP)
それぞれのインプラントにおいて、エントリーポイントおよびエグジットポイントから3基準平面までの距離を、術前の仮想計画インプラントおよび術後の実測インプラントの両方で算出した。
さらに、仮想計画インプラントと実際の術後インプラントにおける対応するエントリーポイントおよびエグジットポイント間の直接距離を測定した。
また、両者の長軸を示す2本の直線のなす角度を求めることで、角度の偏差を記録した。
精度評価および統計解析
これらすべての測定値を比較することにより、術中に適用された仮想外科プランニングの三次元的な精度を評価した。また、コンピュータガイド式サージカルテンプレートが仮想プランを手術室へどの程度正確に反映したか、すなわち最終的なインプラント位置への影響を解析した。
カテゴリ変数(categorical data)は、頻度および百分率として表示した。
数値変数(numerical data)は、平均値(95%信頼区間付き)、標準偏差、および最小値・最大値を用いて表現した。
データの正規性は Shapiro–Wilk検定により確認した。データはパラメトリック分布を示したため、対応のあるt検定(paired t-test)を用いて解析した。
また、観察者間および観察者内の再現性(inter- and intra-observer reliability)は、級内相関係数(ICC: intra-class correlation coefficient)を用いて評価した。
有意水準(significance level)は p ≤ 0.05とした。
統計解析は R統計ソフトウェア(Windows版、バージョン4.3.0)を用いて実施した。
本研究で使用または解析されたデータセットは、合理的な要請に応じて責任著者から入手可能である。
~結果~
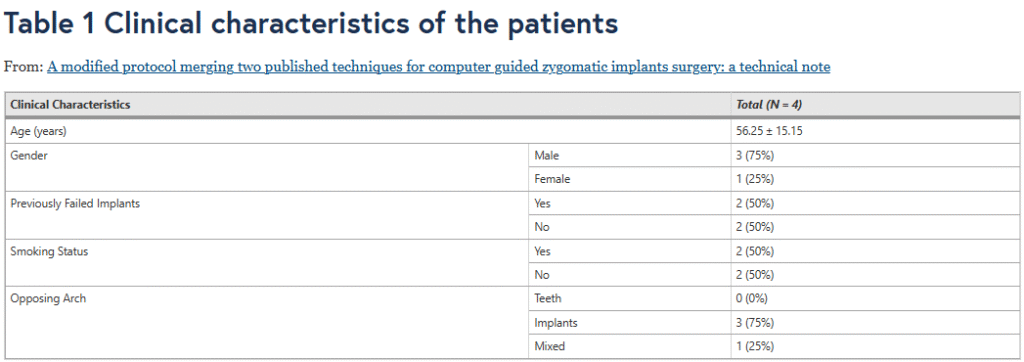
上顎歯列のインプラントによる再建を希望した4名の被験者に対して、合計13本のインプラントが埋入された。対象者は女性1名、男性3名であった。男性患者の年齢はそれぞれ37歳、58歳、74歳であり、女性患者は56歳であった。年齢範囲は37〜74歳で、平均年齢は56歳であった。インプラントの分布は、1名を除いて各患者に4本ずつ埋入された。例外となった1名の患者には、本研究の一環として1本のザイゴマインプラントのみが埋入され、同側に2本の通常インプラントが追加で埋入されたが、これらは本研究に支障をきたすものではなかった。患者の特性をTable 1に示す。
手術の完遂を妨げるような重大な問題や合併症は認められなかった。
1例において、右側のサージカルガイドの前方インプラントスリーブがドリリング中に破折した。しかしこの破折は最終ドリルによるオステオトミー時に発生したため、インプラント埋入時の位置決めには影響を及ぼさなかった。
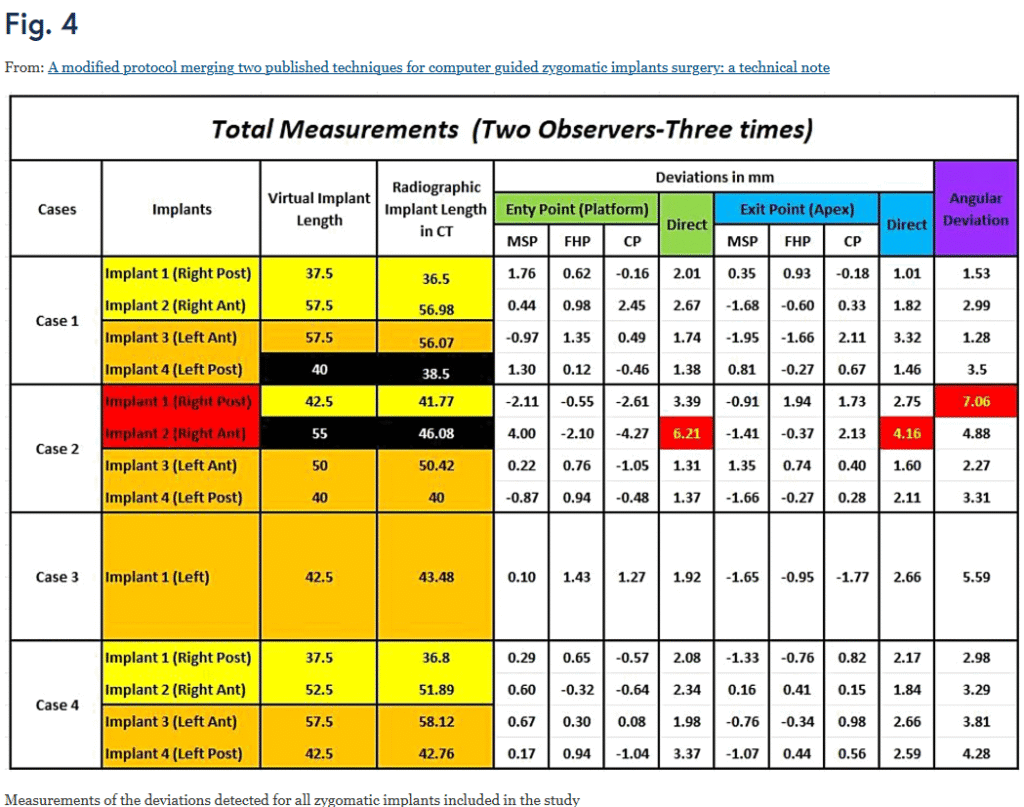
すべてのインプラントのうち、2本のみがバーチャルプランニング時に設定した長さと異なる長さで埋入された。
1本は 40 mm 計画 → 実際は 37.5 mm(Case 1、インプラント4)、もう1本は 55 mm 計画 → 実際は 47.5 mm(Case 2、インプラント2) であった。
すべての偏位測定の詳細は 図4 に示されている。
すべての患者は術後経過に大きな問題を伴わず、合併症もなく良好に経過した。予想された通り、術後には一定の緊張感、不快感、および程度の異なる顔面の腫脹が認められた。
すべての患者において、インプラントのエントリーポイントレベルでの放射線学的評価が術後に実施され、術前計画と比較された。
MSP(正中矢状面)では、偏位は0.43 mm(SD=±1.79)であり、統計的に有意な差は認められなかった(P=0.49)。
FHP(フランクフルト平面)では、偏位は0.39 mm(SD=±1.12)で、こちらも統計的有意差は認められなかった(P=0.32)。
CP(冠状面)での差は−0.54 mm(SD=±2)であり、同様に統計的に有意な差は認められなかった(P=0.44)。
(Table 2 参照)

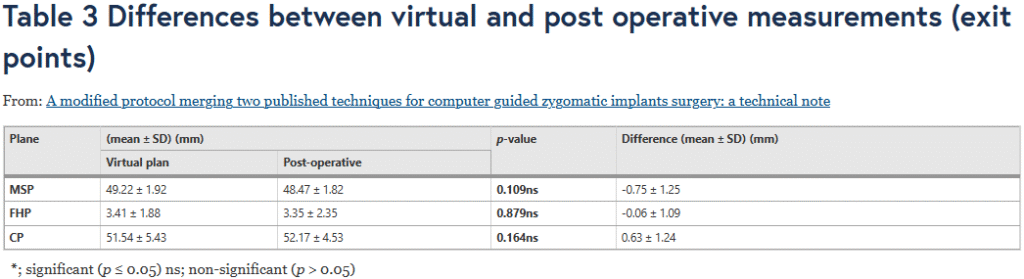
さらに、エグジットポイントレベルにおける仮想計画と術後測定値の差異も測定された。
MSP(正中矢状面)では、偏位は −0.75 mm(SD=±1.25) であり、統計的有意差はなかった(P=0.1)。
FHP(フランクフルト平面)では、偏位は −0.06 mm(SD=±1.09) であり、こちらも統計的有意差は認められなかった(P=0.87)。
CP(冠状面)では、偏位は 0.63 mm(SD=±1.24) で、統計的有意差はなかった(P=0.16)。
(表3参照)
実際のインプラントと仮想計画上のインプラントのエントリーポイントおよび出口ポイントの両方における線形距離を測定することで、直接的な線形偏位の記述統計が算出された。
95%信頼区間の分析の結果、プラットフォーム(エントリーポイント)での偏位は 1.42 mmから3.47 mm の範囲にあり、平均偏位は 2.44 mm ± 1.57 mm であった。
ただし、エントリーレベルでの全偏位範囲は最小1.31 mm、最大6.21 mmであった。
出口ポイント(エグジットレベル)に関しては、最小偏位が1.28 mm、最大偏位が4.16 mmで、平均は2.32 ± 1 mmであった。
この際の95%信頼区間は1.67 mmから2.97 mmの範囲にあった。
(Table 4参照)
さらに、仮想インプラントと実際のインプラントのエントリーおよびエグジットポイントを結ぶ2本の線のなす角度を測定したところ、角度偏位の記述統計が算出された。
その結果、平均角度偏位は 3.6 ± 1.9°であり、最小偏位は1.28°、最大偏位は7.06°であった。
このときの95%信頼区間は下限2.35°、上限4.86°であった。
(Table 4参照)
